 |
 https://arxiv.org/abs/1612.08242 https://arxiv.org/abs/1612.08242 |
|---|
|
 https://arxiv.org/abs/1612.08242 https://arxiv.org/abs/1612.08242 |
|---|
A Yolo cross-platform Windows and Linux version (for object detection). Contributtors: https://github.com/pjreddie/darknet/graphs/contributors
This repository is forked from Linux-version: https://github.com/pjreddie/darknet
More details: http://pjreddie.com/darknet/yolo/
This repository supports:
yolo.cfg (256 MB COCO-model) - require 4 GB GPU-RAM: http://pjreddie.com/media/files/yolo.weightsyolo-voc.cfg (256 MB VOC-model) - require 4 GB GPU-RAM: http://pjreddie.com/media/files/yolo-voc.weightstiny-yolo.cfg (60 MB COCO-model) - require 1 GB GPU-RAM: http://pjreddie.com/media/files/tiny-yolo.weightstiny-yolo-voc.cfg (60 MB VOC-model) - require 1 GB GPU-RAM: http://pjreddie.com/media/files/tiny-yolo-voc.weightsyolo9000.cfg (186 MB Yolo9000-model) - require 4 GB GPU-RAM: http://pjreddie.com/media/files/yolo9000.weightsPut it near compiled: darknet.exe
You can get cfg-files by path: darknet/cfg/

Others: https://www.youtube.com/channel/UC7ev3hNVkx4DzZ3LO19oebg
build\darknet\x64\:darknet_voc.cmd - initialization with 194 MB VOC-model yolo-voc.weights & yolo-voc.cfg and waiting for entering the name of the image filedarknet_demo_voc.cmd - initialization with 194 MB VOC-model yolo-voc.weights & yolo-voc.cfg and play your video file which you must rename to: test.mp4, and store result to: test_dnn_out.avidarknet_net_cam_voc.cmd - initialization with 194 MB VOC-model, play video from network video-camera mjpeg-stream (also from you phone) and store result to: test_dnn_out.avidarknet_web_cam_voc.cmd - initialization with 194 MB VOC-model, play video from Web-Camera number #0 and store result to: test_dnn_out.avidarknet_coco_9000.cmd - initialization with 186 MB Yolo9000 COCO-model, and show detection on the image: dog.jpgdarknet_coco_9000_demo.cmd - initialization with 186 MB Yolo9000 COCO-model, and show detection on the video (if it is present): street4k.mp4darknet.exe detector test data/coco.data yolo.cfg yolo.weights -i 0 -thresh 0.2darknet.exe detect yolo.cfg yolo.weights -i 0 -thresh 0.2darknet.exe detector test data/voc.data yolo-voc.cfg yolo-voc.weights -i 0darknet.exe detector demo data/coco.data yolo.cfg yolo.weights test.mp4 -i 0darknet.exe detector demo data/voc.data yolo-voc.cfg yolo-voc.weights test.mp4 -i 0darknet.exe yolo demo yolo-voc.cfg yolo-voc.weights test.mp4 -i 0darknet.exe detector demo data/voc.data tiny-yolo-voc.cfg tiny-yolo-voc.weights test.mp4 -i 0darknet.exe detector demo data/coco.data yolo.cfg yolo.weights http://192.168.0.80:8080/video?dummy=param.mjpg -i 0darknet.exe detector demo data/voc.data yolo-voc.cfg yolo-voc.weights http://192.168.0.80:8080/video?dummy=param.mjpg -i 0darknet.exe detector demo data/voc.data yolo-voc.cfg yolo-voc.weights -c 0darknet.exe detector test cfg/combine9k.data yolo9000.cfg yolo9000.weightsdarknet.exe detector demo cfg/combine9k.data yolo9000.cfg yolo9000.weights test.mp4* Smart WebCam - preferably: https://play.google.com/store/apps/details?id=com.acontech.android.SmartWebCam2
* IP Webcam: https://play.google.com/store/apps/details?id=com.pas.webcam
darknet.exe detector demo data/coco.data yolo.cfg yolo.weights http://192.168.0.80:8080/video?dummy=param.mjpg -i 0darknet.exe detector demo data/voc.data yolo-voc.cfg yolo-voc.weights http://192.168.0.80:8080/video?dummy=param.mjpg -i 0Just do make in the darknet directory.
Before make, you can set such options in the Makefile: link
* GPU=1 to build with CUDA to accelerate by using GPU
* CUDNN=1 to build with cuDNN v5/v6 to accelerate training by using GPU
* OPENCV=1 to build with OpenCV 3.x/2.4.x - allows to detect on video files and video streams from network cameras or web-cams
* DEBUG=1 to bould debug version of Yolo
* OPENMP=1 to build with OpenMP support to accelerate Yolo by using multi-core CPU
* LIBSO=1 to build a library darknet.so and binary runable file uselib that uses this library. How to use this SO-library from your own code - you can look at C++ example: https://github.com/AlexeyAB/darknet/blob/master/src/yolo_console_dll.cpp
If you have MSVS 2015, CUDA 8.0 and OpenCV 3.0 (with paths: C:\opencv_3.0\opencv\build\include & C:\opencv_3.0\opencv\build\x64\vc14\lib), then start MSVS, open build\darknet\darknet.sln, set x64 and Release, and do the: Build -> Build darknet
1.1. Find files opencv_world320.dll and opencv_ffmpeg320_64.dll in C:\opencv_3.0\opencv\build\x64\vc14\bin and put it near with darknet.exe
If you have other version of CUDA (not 8.0) then open build\darknet\darknet.vcxproj by using Notepad, find 2 places with "CUDA 8.0" and change it to your CUDA-version, then do step 1
If you don't have GPU, but have MSVS 2015 and OpenCV 3.0 (with paths: C:\opencv_3.0\opencv\build\include & C:\opencv_3.0\opencv\build\x64\vc14\lib), then start MSVS, open build\darknet\darknet_no_gpu.sln, set x64 and Release, and do the: Build -> Build darknet
If you have OpenCV 2.4.13 instead of 3.0 then you should change pathes after \darknet.sln is opened
4.1 (right click on project) -> properties -> C/C++ -> General -> Additional Include Directories: C:\opencv_2.4.13\opencv\build\include
4.2 (right click on project) -> properties -> Linker -> General -> Additional Library Directories: C:\opencv_2.4.13\opencv\build\x64\vc14\lib
If you have other version of OpenCV 2.4.x (not 3.x) then you also should change lines like #pragma comment(lib, "opencv_core2413.lib") in the file \src\detector.c
If you want to build with CUDNN to speed up then:
cudnn with path to CUDNN: https://hsto.org/files/a49/3dc/fc4/a493dcfc4bd34a1295fd15e0e2e01f26.jpg\darknet.sln -> (right click on project) -> properties -> C/C++ -> Preprocessor -> Preprocessor Definitions, and add at the beginning of line: CUDNN;Also, you can to create your own darknet.sln & darknet.vcxproj, this example for CUDA 8.0 and OpenCV 3.0
Then add to your created project:
- (right click on project) -> properties -> C/C++ -> General -> Additional Include Directories, put here:
C:\opencv_3.0\opencv\build\include;..\..\3rdparty\include;%(AdditionalIncludeDirectories);$(CudaToolkitIncludeDir);$(cudnn)\include
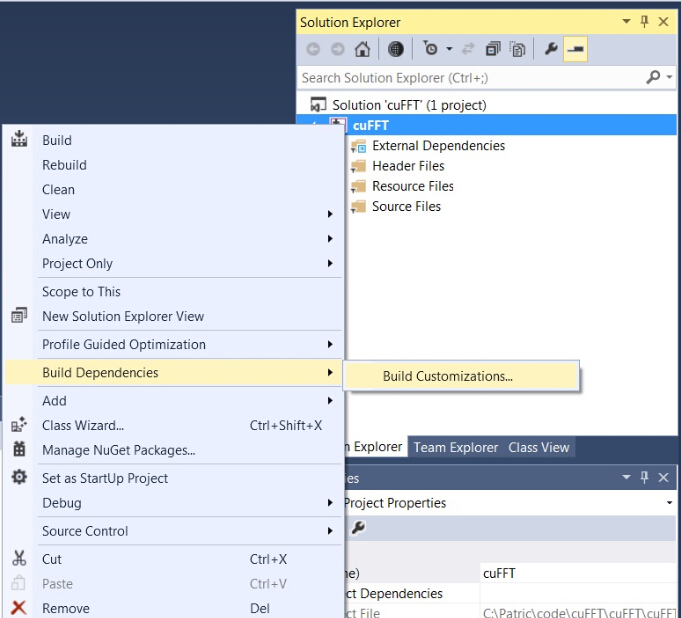
- (right click on project) -> Build dependecies -> Build Customizations -> set check on CUDA 8.0 or what version you have - for example as here: http://devblogs.nvidia.com/parallelforall/wp-content/uploads/2015/01/VS2013-R-5.jpg
- add to project all .c & .cu files from \src
- (right click on project) -> properties -> Linker -> General -> Additional Library Directories, put here:
C:\opencv_3.0\opencv\build\x64\vc14\lib;$(CUDA_PATH)lib\$(PlatformName);$(cudnn)\lib\x64;%(AdditionalLibraryDirectories)
- (right click on project) -> properties -> Linker -> Input -> Additional dependecies, put here:
..\..\3rdparty\lib\x64\pthreadVC2.lib;cublas.lib;curand.lib;cudart.lib;cudnn.lib;%(AdditionalDependencies)
- (right click on project) -> properties -> C/C++ -> Preprocessor -> Preprocessor Definitions
OPENCV;_TIMESPEC_DEFINED;_CRT_SECURE_NO_WARNINGS;_CRT_RAND_S;WIN32;NDEBUG;_CONSOLE;_LIB;%(PreprocessorDefinitions)
open file: \src\detector.c and check lines #pragma and #inclue for OpenCV.
compile to .exe (X64 & Release) and put .dll-s near with .exe:
pthreadVC2.dll, pthreadGC2.dll from \3rdparty\dll\x64cusolver64_80.dll, curand64_80.dll, cudart64_80.dll, cublas64_80.dll - 80 for CUDA 8.0 or your version, from C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v8.0\binopencv_world320.dll and opencv_ffmpeg320_64.dll from C:\opencv_3.0\opencv\build\x64\vc14\binopencv_core249.dll, opencv_highgui249.dll and opencv_ffmpeg249_64.dll from C:\opencv_2.4.9\opencv\build\x64\vc14\binDownload pre-trained weights for the convolutional layers (76 MB): http://pjreddie.com/media/files/darknet19_448.conv.23 and put to the directory build\darknet\x64
Download The Pascal VOC Data and unpack it to directory build\darknet\x64\data\voc will be created dir build\darknet\x64\data\voc\VOCdevkit\:
2.1 Download file voc_label.py to dir build\darknet\x64\data\voc: http://pjreddie.com/media/files/voc_label.py
Download and install Python for Windows: https://www.python.org/ftp/python/3.5.2/python-3.5.2-amd64.exe
Run command: python build\darknet\x64\data\voc\voc_label.py (to generate files: 2007_test.txt, 2007_train.txt, 2007_val.txt, 2012_train.txt, 2012_val.txt)
Run command: type 2007_train.txt 2007_val.txt 2012_*.txt > train.txt
Set batch=64 and subdivisions=8 in the file yolo-voc.2.0.cfg: link
Start training by using train_voc.cmd or by using the command line: darknet.exe detector train data/voc.data yolo-voc.2.0.cfg darknet19_448.conv.23
If required change pathes in the file build\darknet\x64\data\voc.data
More information about training by the link: http://pjreddie.com/darknet/yolo/#train-voc
Train it first on 1 GPU for like 1000 iterations: darknet.exe detector train data/voc.data yolo-voc.2.0.cfg darknet19_448.conv.23
Then stop and by using partially-trained model /backup/yolo-voc_1000.weights run training with multigpu (up to 4 GPUs): darknet.exe detector train data/voc.data yolo-voc.2.0.cfg yolo-voc_1000.weights -gpus 0,1,2,3
https://groups.google.com/d/msg/darknet/NbJqonJBTSY/Te5PfIpuCAAJ
yolo-obj.cfg with the same content as in yolo-voc.2.0.cfg (or copy yolo-voc.2.0.cfg to yolo-obj.cfg) and:batch=64subdivisions=8classes=20 to your number of objectsfilters=125 to filters=(classes + 5)*5 (generally this depends on the num and coords, i.e. equal to (classes + coords + 1)*num)For example, for 2 objects, your file yolo-obj.cfg should differ from yolo-voc.2.0.cfg in such lines:
```
[convolutional]
filters=35
[region]
classes=2
```
Create file obj.names in the directory build\darknet\x64\data\, with objects names - each in new line
Create file obj.data in the directory build\darknet\x64\data\, containing (where classes = number of objects):
classes= 2 train = data/train.txt valid = data/test.txt names = data/obj.names backup = backup/
Put image-files (.jpg) of your objects in the directory build\darknet\x64\data\obj\
Create .txt-file for each .jpg-image-file - in the same directory and with the same name, but with .txt-extension, and put to file: object number and object coordinates on this image, for each object in new line: <object-class> <x> <y> <width> <height>
Where:
* <object-class> - integer number of object from 0 to (classes-1)
* <x> <y> <width> <height> - float values relative to width and height of image, it can be equal from 0.0 to 1.0
* for example: <x> = <absolute_x> / <image_width> or <height> = <absolute_height> / <image_height>
* atention: <x> <y> - are center of rectangle (are not top-left corner)
For example for img1.jpg you should create img1.txt containing:
1 0.716797 0.395833 0.216406 0.147222 0 0.687109 0.379167 0.255469 0.158333 1 0.420312 0.395833 0.140625 0.166667
train.txt in directory build\darknet\x64\data\, with filenames of your images, each filename in new line, with path relative to darknet.exe, for example containing: data/obj/img1.jpg data/obj/img2.jpg data/obj/img3.jpg
Download pre-trained weights for the convolutional layers (76 MB): http://pjreddie.com/media/files/darknet19_448.conv.23 and put to the directory build\darknet\x64
Start training by using the command line: darknet.exe detector train data/obj.data yolo-obj.cfg darknet19_448.conv.23
(file yolo-obj_xxx.weights will be saved to the build\darknet\x64\backup\ for each 100 iterations until 1000 iterations has been reached, and after for each 1000 iterations)
After training is complete - get result yolo-obj_final.weights from path build\darknet\x64\backup\
After each 1000 iterations you can stop and later start training from this point. For example, after 2000 iterations you can stop training, and later just copy yolo-obj_2000.weights from build\darknet\x64\backup\ to build\darknet\x64\ and start training using: darknet.exe detector train data/obj.data yolo-obj.cfg yolo-obj_2000.weights
Also you can get result earlier than all 45000 iterations.
Usually sufficient 2000 iterations for each class(object). But for a more precise definition when you should stop training, use the following manual:
> Region Avg IOU: 0.798363, Class: 0.893232, Obj: 0.700808, No Obj: 0.004567, Avg Recall: 1.000000, count: 8
> Region Avg IOU: 0.800677, Class: 0.892181, Obj: 0.701590, No Obj: 0.004574, Avg Recall: 1.000000, count: 8
>
> 9002: 0.211667, 0.060730 avg, 0.001000 rate, 3.868000 seconds, 576128 images
> Loaded: 0.000000 seconds
When you see that average loss 0.xxxxxx avg no longer decreases at many iterations then you should stop training.
.weights-files from darknet\build\darknet\x64\backup and choose the best of them:For example, you stopped training after 9000 iterations, but the best result can give one of previous weights (7000, 8000, 9000). It can happen due to overfitting. Overfitting - is case when you can detect objects on images from training-dataset, but can't detect ojbects on any others images. You should get weights from Early Stopping Point:

To get weights from Early Stopping Point:
2.1. At first, in your file obj.data you must specify the path to the validation dataset valid = valid.txt (format of valid.txt as in train.txt), and if you haven't validation images, just copy data\train.txt to data\valid.txt.
2.2 If training is stopped after 9000 iterations, to validate some of previous weights use this commands:
darknet.exe detector recall data/obj.data yolo-obj.cfg backup\yolo-obj_7000.weightsdarknet.exe detector recall data/obj.data yolo-obj.cfg backup\yolo-obj_8000.weightsdarknet.exe detector recall data/obj.data yolo-obj.cfg backup\yolo-obj_9000.weightsAnd comapre last output lines for each weights (7000, 8000, 9000):
7586 7612 7689 RPs/Img: 68.23 IOU: 77.86% Recall:99.00%
For example, bigger IOU gives weights yolo-obj_8000.weights - then use this weights for detection.

Example of custom object detection: darknet.exe detector test data/obj.data yolo-obj.cfg yolo-obj_8000.weights
 |
 |
|---|
set flag random=1 in your .cfg-file - it will increase precision by training Yolo for different resolutions: [link]https://github.com/AlexeyAB/darknet/blob/master/cfg/yolo-voc.2.0.cfg#L244)
desirable that your training dataset include images with objects at diffrent: scales, rotations, lightings, from different sides
Increase network-resolution by set in your .cfg-file (height=608 and width=608) or (height=832 and width=832) or (any value multiple of 32) - this increases the precision and makes it possible to detect small objects: link
.weights-file already trained for 416x416 resolutionOut of memory occurs then in .cfg-file you should increase subdivisions=16, 32 or 64: linkHere you can find repository with GUI-software for marking bounded boxes of objects and generating annotation files for Yolo v2: https://github.com/AlexeyAB/Yolo_mark
With example of: train.txt, obj.names, obj.data, yolo-obj.cfg, air1-6.txt, bird1-4.txt for 2 classes of objects (air, bird) and train_obj.cmd with example how to train this image-set with Yolo v2
To compile Yolo as C++ DLL-file yolo_cpp_dll.dll - open in MSVS2015 file build\darknet\yolo_cpp_dll.sln, set x64 and Release, and do the: Build -> Build yolo_cpp_dll
CUDNN;To use Yolo as DLL-file in your C++ console application - open in MSVS2015 file build\darknet\yolo_console_dll.sln, set x64 and Release, and do the: Build -> Build yolo_console_dll
build\darknet\x64\yolo_console_dll.exeyolo-voc.cfg and yolo-voc.weights to the directory build\darknet\ )<obj_id> <left_x> <top_y> <width> <height> <probability>//#define OPENCV in yolo_console_dll.cpp-file: linkyolo_cpp_dll.dll-API: link
```
class Detector {
public:
Detector(std::string cfg_filename, std::string weight_filename, int gpu_id = 0);
~Detector();
std::vector<bbox_t> detect(std::string image_filename, float thresh = 0.2, bool use_mean = false);
std::vector<bbox_t> detect(image_t img, float thresh = 0.2, bool use_mean = false);
static image_t load_image(std::string image_filename);
static void free_image(image_t m);
std::vector<bbox_t> detect(cv::Mat mat, float thresh = 0.2, bool use_mean = false);
};
```

{kind=link}
{kind=link}